- Плоскость (геометрия)
-
Сюда перенаправляется запрос «Плоскостность». На эту тему нужна отдельная статья.
 Две пересекающиеся плоскости
Две пересекающиеся плоскости
Пло́скость — одно из основных понятий геометрии. При систематическом изложении геометрии понятие плоскости обычно принимается за одно из исходных понятий, которое лишь косвенным образом определяется аксиомами геометрии.
Содержание
Некоторые характеристические свойства плоскости
- Плоскость — поверхность, содержащая полностью каждую прямую, соединяющую любые её точки;
- Две плоскости являются либо параллельными, либо пересекаются по прямой.
- Прямая либо параллельна плоскости, либо пересекает ее в одной точке, либо находится на плоскости.
- Две прямые, перпендикулярные одной и той же плоскости, параллельны друг другу.
- Две плоскости, перпендикулярные одной и той же прямой, параллельны друг другу.
Аналогично отрезку и интервалу, плоскость, не включающую крайние точки, можно назвать интервальной плоскостью, или открытой плоскостью.
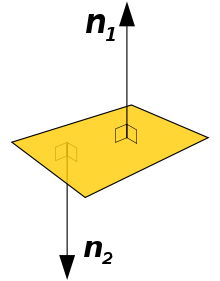 Плоскость и два её нормальных вектора: n1 и n2
Плоскость и два её нормальных вектора: n1 и n2Уравнения плоскости
Впервые встречается у А. К. Клеро (1731).
Уравнение плоскости в отрезках, по-видимому, впервые встречается у Г.Ламе (1816—1818).
Нормальное уравнение ввёл Л. О. Гессе (1861).
Плоскость — алгебраическая поверхность первого порядка: в декартовой системе координат плоскость может быть задана уравнением первой степени.
- Общее уравнение (полное) плоскости
где
 и
и  — постоянные, причём
— постоянные, причём  и
и  одновременно не равны нулю; в векторной форме:
одновременно не равны нулю; в векторной форме:где
 — радиус-вектор точки
— радиус-вектор точки  , вектор
, вектор  перпендикулярен к плоскости (нормальный вектор). Направляющие косинусы вектора
перпендикулярен к плоскости (нормальный вектор). Направляющие косинусы вектора  :
:Если один из коэффициентов в уравнении плоскости равен нулю, уравнение называется неполным. При
 плоскость проходит через начало координат, при
плоскость проходит через начало координат, при  (или
(или  ,
,  ) П. параллельна оси
) П. параллельна оси  (соответственно
(соответственно  или
или  ). При
). При  (
( , или
, или  ) плоскость параллельна плоскости
) плоскость параллельна плоскости  (соответственно
(соответственно  или
или  ).
).- Уравнение плоскости в отрезках:
где
 ,
,  ,
,  — отрезки, отсекаемые плоскостью на осях
— отрезки, отсекаемые плоскостью на осях  и .
и .- Уравнение плоскости, проходящей через точку
 перпендикулярно вектору нормали
перпендикулярно вектору нормали  :
:
в векторной форме:
- Уравнение плоскости, проходящей через три заданные точки
 , не лежащие на одной прямой:
, не лежащие на одной прямой:
(смешанное произведение векторов), иначе
- Нормальное (нормированное) уравнение плоскости
в векторной форме:
где
 - единичный вектор,
- единичный вектор,  — расстояние П. от начала координат. Уравнение (2) может быть получено из уравнения (1) умножением на нормирующий множитель
— расстояние П. от начала координат. Уравнение (2) может быть получено из уравнения (1) умножением на нормирующий множитель(знаки
 и противоположны).
и противоположны).Определение по точке и вектору нормали
В трехмерном пространстве одним из важнейших способов определения плоскости является указание точки на плоскости и вектора нормали к ней.
Допустим,
 является радиусом-вектором точки
является радиусом-вектором точки  , заданной на плоскости, и допустим, что n - это ненулевой вектор, перпендикулярный к плоскости (нормаль). Идея состоит в том, что точка
, заданной на плоскости, и допустим, что n - это ненулевой вектор, перпендикулярный к плоскости (нормаль). Идея состоит в том, что точка  с радиусом-вектором r находится на плоскости тогда и только тогда, когда вектор, проведённый от к , перпендикулярен n.
с радиусом-вектором r находится на плоскости тогда и только тогда, когда вектор, проведённый от к , перпендикулярен n.Вернёмся к тому, что два вектора являются перпендикулярными тогда и только тогда, когда их скалярное произведение равно нулю. Отсюда следует, что нужная нам плоскость может быть выражена как множество всех точек r таких, что:
 (Здесь точка означает скалярное произведение, а не умножение.)
(Здесь точка означает скалярное произведение, а не умножение.)
Развернув выражение, мы получим:
что является знакомым нам уравнением плоскости.
Например: Дано: точка на плоскости
 и вектор нормали
и вектор нормали  .
.Уравнение плоскости записывается так:



Расстояние от точки до плоскости
Расстояние от точки до плоскости — это наименьшее из расстояний между этой точкой и точками плоскости. Известно, что расстояние от точки до плоскости равно длине перпендикуляра, опущенного из этой точки на плоскость.
- Отклонение точки
 от плоскости заданной нормированным уравнением
от плоскости заданной нормированным уравнением 

-
 ,если
,если  и начало координат лежат по разные стороны плоскости, в противоположном случае
и начало координат лежат по разные стороны плоскости, в противоположном случае  . Расстояние от точки до плоскости равно
. Расстояние от точки до плоскости равно 
- Расстояние
 от точки
от точки  , до плоскости, заданной уравнением
, до плоскости, заданной уравнением  , вычисляется по формуле:
, вычисляется по формуле:

Расстояние между параллельными плоскостями
- Расстояние между плоскостями, заданными уравнениями
 и
и  :
:

- Расстояние между плоскостями, заданными уравнениями
 и
и  :
:
![d=\frac{\mid[\bar r_2 - \bar r_1, \bar n]\mid}{\mid\bar n\mid}](ba1b842418235c589b8978a7b0a22cc1.png)
 Типы взаимного расположения трёх или менее плоскостей. В частности, 4 тип — пересечение двух плоскостей, 11 тип — плоскость E3 проходит через линию пересечения плоскостей E1 и E2, 12 тип — пересечение трёх плоскостей в точке
Типы взаимного расположения трёх или менее плоскостей. В частности, 4 тип — пересечение двух плоскостей, 11 тип — плоскость E3 проходит через линию пересечения плоскостей E1 и E2, 12 тип — пересечение трёх плоскостей в точкеСвязанные понятия
- Угол между двумя плоскостями. Если уравнения П. заданы в виде (1), то
Если в векторной форме, то
- Плоскости параллельны, если
 или
или ![[\mathbf{N_1}, \mathbf{N_2}]=0.](83c4f10480c2faf72762045ecf9ddb56.png) (Векторное произведение)
(Векторное произведение)
- Плоскости перпендикулярны, если
 или
или  . (Скалярное произведение)
. (Скалярное произведение)
- Пучок плоскостей — все плоскости, проходящие через линию пересечения двух плоскостей. Уравнение пучка плоскостей, то есть любой плоскости, проходящей через линию пересечения двух плоскостей, имеет вид[1]:
- где
 и
и  — любые числа, не равные одновременно нулю. Уравнение самой этой линии можно найти из уравнения пучка, подставляя α=1, β=0 и α=0, β=1.
— любые числа, не равные одновременно нулю. Уравнение самой этой линии можно найти из уравнения пучка, подставляя α=1, β=0 и α=0, β=1.
- Связка плоскостей — все плоскости, проходящие через точку пересечения трёх плоскостей[1]. Уравнение связки плоскостей, то есть любой плоскости, проходящей через точку пересечения трёх плоскостей, имеет вид:
- где , и
 — любые числа, не равные одновременно нулю. Саму эту точку можно найти из уравнения связки, подставляя α=1, β=0, γ=0; α=0, β=1, γ=0 и α=0, β=0, γ=1 и решая получившуюся систему уравнений.
— любые числа, не равные одновременно нулю. Саму эту точку можно найти из уравнения связки, подставляя α=1, β=0, γ=0; α=0, β=1, γ=0 и α=0, β=0, γ=1 и решая получившуюся систему уравнений.
N-плоскость в пространстве

Пусть дано n-мерное аффинный-точененое пространство
 , над полем действительных чисел. В нём выбрана прямоугольная система координат
, над полем действительных чисел. В нём выбрана прямоугольная система координат  . m-плоскостью называется множество точек , радиус векторы которых удовлетворяют следующему соотношению
. m-плоскостью называется множество точек , радиус векторы которых удовлетворяют следующему соотношению 
 - матрица, столбцы которой образует направляющие подпространство плоскости,
- матрица, столбцы которой образует направляющие подпространство плоскости,  - вектор переменных,
- вектор переменных,  - радиус-вектор одной из точек плоскости.
- радиус-вектор одной из точек плоскости.
Указанное соотношение можно из матрично-векторного вида перевести в векторный:
 - векторное уравнение m-плоскости.
- векторное уравнение m-плоскости.
Вектора образуют направляющее подпространство. Две m-плоскости
образуют направляющее подпространство. Две m-плоскости  называются параллельными, если их направляющие пространства совпадают и
называются параллельными, если их направляющие пространства совпадают и  .
.(n-1)-плоскость в n-мерном пространстве называется гиперплоскостью или просто плоскостью. Для гиперплоскости существует общее уравнение плоскости. Пусть
 - нормальный вектор плоскости,
- нормальный вектор плоскости,  - вектор переменных,
- вектор переменных,  - радиус вектор точки, принадлежащей плоскости, тогда:
- радиус вектор точки, принадлежащей плоскости, тогда:
 - общее уравнение плоскости.
- общее уравнение плоскости.
Имя матрицу направляющих векторов, уравнение можно записать так: , или:
, или:
 .
.
Углом между плоскостями называется наименьший угол между их нормальными векторами.Примеры m-плоскостей
- Примером 1-плоскости в трёхмерном пространстве (n=3) служит прямая. Её векторное уравнение имеет вид:
 . В случае n = 2 прямая является гиперплоскостью.
. В случае n = 2 прямая является гиперплоскостью. - Гиперплоскостью в трёхмерном пространстве соответствует привычному понятию плоскости.
См. также
Примечания
- ↑ 1 2 Гусятников П.Б., Резниченко С.В. Векторная алгебра в примерах и задачах. — М.: Высшая школа, 1985. — 232 с.
Литература
Ильин В. А., Позняк Э. Г. Аналитическая геометрия. — М.: ФИЗМАТЛИТ, 2002. — 240 с.
Ссылки
 На Викискладе есть медиафайлы по теме Плоскость (геометрия)
На Викискладе есть медиафайлы по теме Плоскость (геометрия)
Категории:- Евклидова геометрия
- Аксиоматические термины




















Wikimedia Foundation. 2010.